Zasadniczo zależy to od momentu obrotowego, jaki może wytworzyć Twój stepper ! Silnik krokowy o wysokim momencie obrotowym (im większa wysokość krokowego, tym silniejszy krokowy) może popychać żarnik ze znacznie większą siłą niż silnik krokowy z mniejszym momentem obrotowym. Aby zwiększyć moment obrotowy, należy zastosować przełożenie w celu zmniejszenia prędkości. Ponieważ moment obrotowy i prędkość są odwrotnie proporcjonalne, zmniejszenie o połowę prędkości podwaja moment obrotowy.
Jeśli twój stepper jest wystarczająco mocny, możesz użyć napędu bezpośredniego (bez przekładni), aby popchnąć żarnik. Jeśli jednak chcesz, aby ten sam stepper poruszał filamentem o większej średnicy, możesz nie mieć wystarczającego momentu obrotowego, aby to zrobić. Oznacza to, że będziesz musiał zwiększyć moment obrotowy, stosując redukcję biegów. Stosowanie wytłaczarek z napędem bezpośrednim wymaga więc dużego momentu obrotowego, a co za tym idzie silników krokowych o dużej masie, co powoduje znaczny wzrost masy wózka głowicy. Używanie silników krokowych z mniejszym momentem obrotowym (często nazywanych stepperami naleśnikowymi ze względu na ich zmniejszoną wysokość) do takich zastosowań jest często postrzegane wraz z redukcją biegów. Wadą zmniejszania prędkości jest to, że zmniejszasz również maksymalną szybkość drukowania lub maksymalną prędkość cofania filamentu. Aby zmniejszyć prędkość, możesz użyć redukcji biegów za pomocą kół zębatych lub użyć kół pasowych i pasów. Główną zaletą redukcji paska jest to, że działa bez znacznie mniej hałasu niż przy użyciu kół zębatych.
Załóżmy, że masz wystarczająco mocny stepper i chcesz wytłaczać włókna o większej średnicy. Do obliczenia przełożenia można wykorzystać następujące wytyczne. Ponadto, jeśli wyrazisz wartość w rzeczywistym momencie obrotowym, możesz wrócić do obliczenia redukcji przełożenia dla krokowego steppera, którego użyłbyś do zastąpienia obecnego silnika momentu obrotowego o wartości X, który pozostaje jako ćwiczenie.
Od 1,75 mm do 2,85 mm
Zakładając, że siła, jaką dysza wywiera na platformę roboczą ( $ F_n $ ) jest stała dla różnych typów filamentów, byłbyś w stanie obliczyć stosunek siły dla ekstrudera ( $ F_ {e} $ ) i dyszy o dowolnej średnicy filamentu używając ciśnienia w dyszy używając:
$$ p = \ frac {F} {A} $$
Gdzie, $ p $ to ciśnienie, $ F $ to siła, a $ A $ obszar.
$$ p = \ frac {F_e} {A_e} = \ frac {F_n} {A_n} \\ F_n = F_e \ frac {A_e} {A_n} = F_ {e_ {1.75}} \ frac {\ frac {1} {4} \ \ pi \ d_ {1.75} ^ 2} {\ frac {1} {4} \ \ pi \ d_ {n} ^ 2} = F_ {e_ {2.85}} \ frac {\ frac {1} {4} \ \ pi \ d_ {2.85} ^ 2} {\ frac {1} {4} \ \ pi \ d_ {n} ^ 2} $$
Gdzie $ d $ oznacza średnicę dyszy lub żarnika. Indeksy $ e $ i $ n $ oznaczają odpowiednio wytłaczarkę i dyszę.
Zwróć uwagę, że siła generowana przez wytłaczarkę jest wyprowadzana bezpośrednio z momentu obrotowego silnika krokowego $ \ tau $ lub przez przekładnię zębatą (przełożenie $ R_ {gear} $ ):
$$ \ tau_ {e} = R_ {gear} \ times \ tau_ {stepper} $$ Uwaga, przełożenie 1 oznacza napęd bezpośredni.
Siła byłaby wtedy obliczona poprzez podzielenie momentu obrotowego przez promień ( $ r $ ) ekstrudera:
$$ F = \ frac {\ tau_e} {r} $$
Połączenie równań daje nam:
$$ \ begin {align *} &1.75 \ {filament} \ \ Rightarrow F_n = \ left (\ frac {1 \ times \ tau_ {stepper}} {r_ {e_ {1.75}}} \ right) \ frac {d_ {1,75} ^ 2} {d_ {n} ^ 2} \\
&2.85 \ {filament} \ \ Rightarrow F_n = \ left (\ frac {R_ {bieg} \ times \ tau_ {stepper}} {r_ {e_ {2.85}}} \ right) \ frac {d_ {2.85} ^ 2} {d_ {n} ^ 2} \ end {align *} $$
Który można przepisać na:
$$ R_ {gear} = \ frac {d_ {1.75} ^ 2} {d_ {n} ^ 2} \ times \ frac {d_ {n} ^ 2} {d_ {2.85} ^ 2} \ times \ frac {r_ {e_ {2.85}}} {r_ {e_ {1.75}}} $$
Pamiętaj, że każdy $ d_ {n} ^ 2 $ ma zastosowanie do rozmiaru dyszy ekstrudera. Dlatego w przypadku podobnych rozmiarów dysz termin $ d_ {n} ^ 2 $ jest anulowany: $$ R_ {gear} = \ frac {d_ {1.75} ^ 2} {d_ {2.85} ^ 2} \ times \ frac {r_ {e_ {2.85}}} {r_ {e_ {1.75}}} $$
Oznacza to, że jeśli przejdziesz z 1,75 mm do 2,85 mm filamentu, dla dokładnie tego samego promienia przekładni ekstrudera (co nie jest prawdopodobne, ponieważ prawdopodobnie potrzebujesz innej przekładni / śruby hobbed, która może pomieścić filament o większej średnicy) przełożenie wynosi 1: 2,65 $ i dlatego musisz odpowiednio zmniejszyć prędkość.
Powód, dla którego widzisz różne przełożenia, może nie tylko można wyjaśnić różnicami w różnicach w średnicy przekładni / śrub obwiedniowych wytłaczarki, ale także w wartościach momentu obrotowego krokowego.
Dla filamentu 3 mm stosunek będzie rzędu 1 USD: 2,94 USD za równoważne promienie przekładni ekstrudera i ponowne użycie tego samego silnika krokowego.
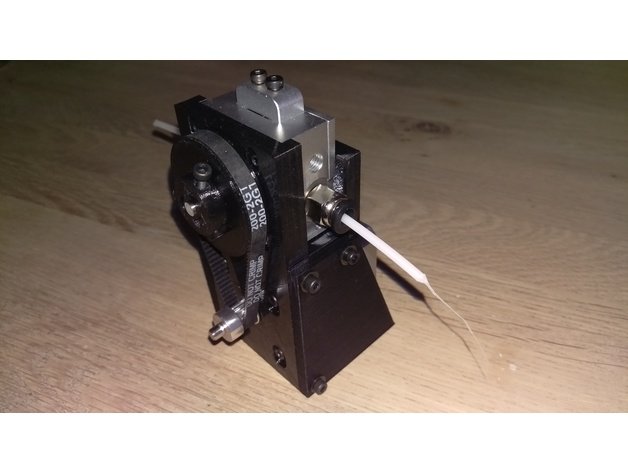
Podobne obliczenia pokazują, że dla dyszy 0,2 mm w wytłaczarce z filamentem 2,85 mm wymagane jest przełożenie 1: 5,3 $ . To „dodatkowe miejsce” na dodatkowy moment obrotowy w celu zamontowania mniejszych dysz wyjaśnia również większe redukcje biegów. To, co jest optymalne, jest określone nie tylko przez rozmiar dyszy i średnicę żarnika, ale także bardzo zależy od silnika krokowego i wytwarzanego przez niego momentu obrotowego. Redukcje biegów powinny być ograniczone, aby nie minimalizowały ogólnej prędkości drukowania lub powodowały problemy z cofaniem (to drugie sam doświadczyłem, zbyt duża prędkość wsuwania spowodowała, że stepper pomijał kroki mojego niestandardowego buldoga 1,75 mm do 2,85 mm konwersja wytłaczarki. Używam 1: 4 $ redukcji prędkości, aby wytworzyć wystarczający moment obrotowy za pomocą krokowego, który jest zwykle używany do napędu bezpośredniego (1,75 mm Należy zwrócić uwagę, że w aluminiowej obudowie buldoga znajduje się przekładnia ekstrudera o różnych rozmiarach, aby pomieścić filament o większej średnicy: